Merge pull request #11 from Everglow0214/master
lecture 14 finished
Showing
docs/14.md
0 → 100644
docs/img/fig14_1.png
0 → 100644
{kind=link}
72.5 KB
docs/img/fig14_2.png
0 → 100644
{kind=link}
214.4 KB
docs/img/fig14_3.png
0 → 100644
{kind=link}
253.7 KB
docs/img/fig14_4.png
0 → 100644
{kind=link}
136.5 KB
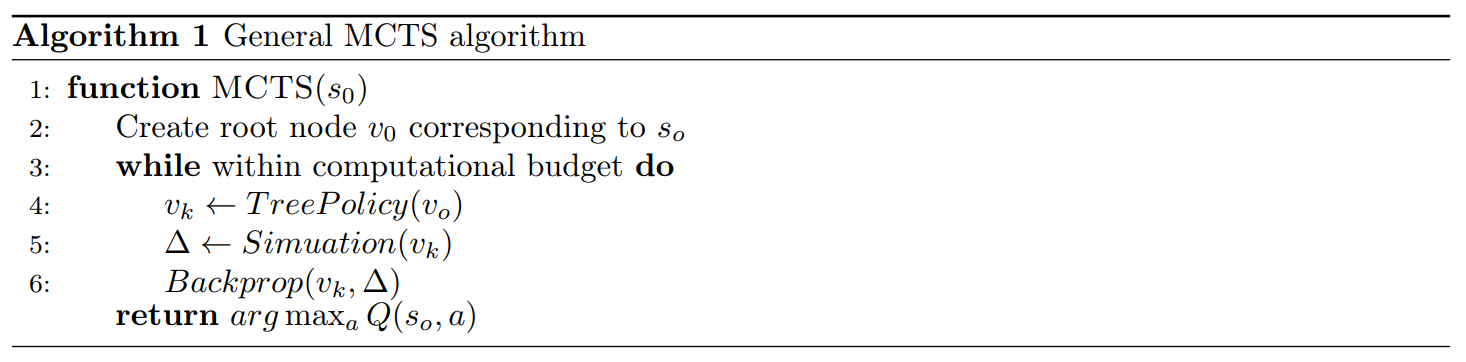
docs/img/fig14_alg_1.png
0 → 100644
{kind=link}
79.5 KB
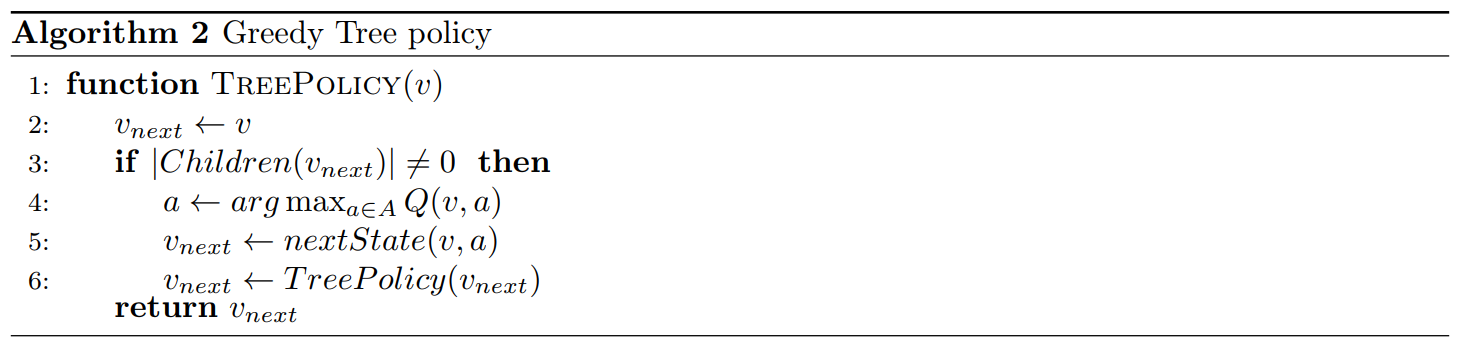
docs/img/fig14_alg_2.png
0 → 100644
{kind=link}
64.6 KB
docs/img/fig14_alg_3.png
0 → 100644
{kind=link}

64.4 KB