Merge pull request #81 from rickllyxu/dev
校对了Chapter16,翻译了附录CD
Showing
此差异已折叠。
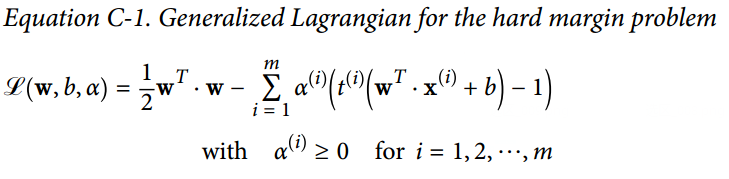
docs/Appendix_C.SVM对偶问题.md
0 → 100644
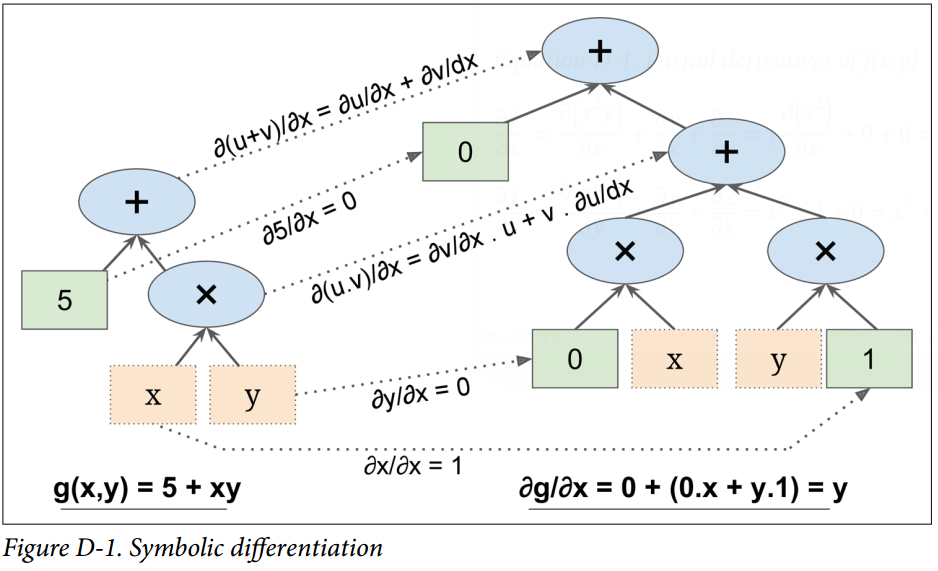
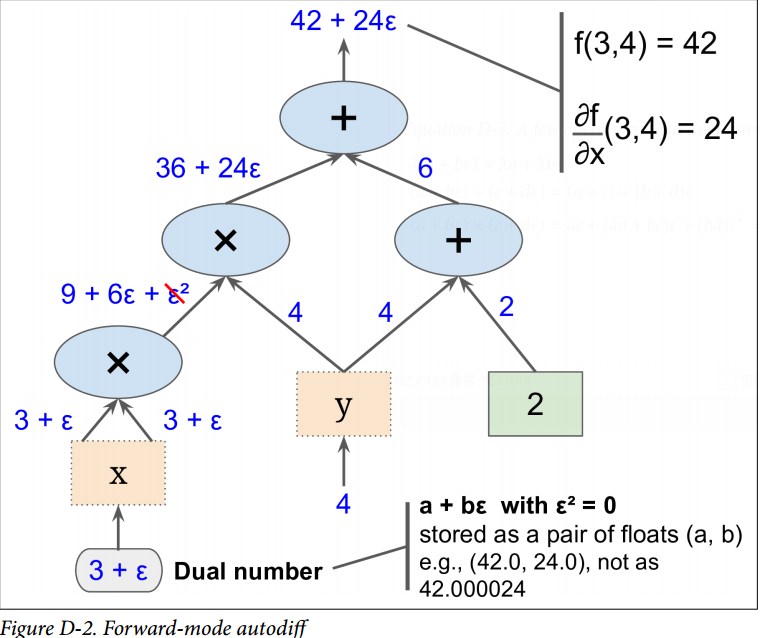
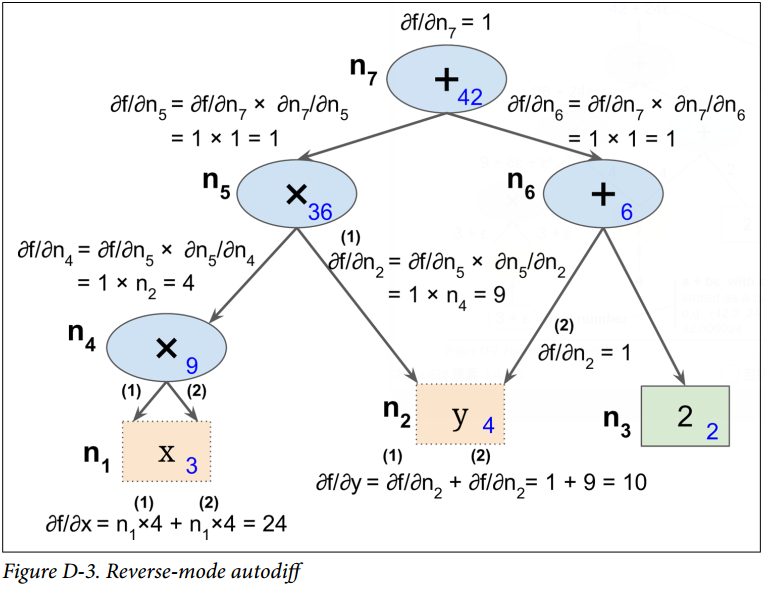
docs/Appendix_D.自动微分.md
0 → 100644
images/Appendix/D-1.png
0 → 100644
{kind=link}
160.3 KB
images/Appendix/D-2.png
0 → 100644
{kind=link}
123.8 KB
images/Appendix/D-3.png
0 → 100644
{kind=link}
132.5 KB
images/Appendix/E_C-1.png
0 → 100644
{kind=link}
41.7 KB
images/Appendix/E_C-2.png
0 → 100644
{kind=link}
45.5 KB
images/Appendix/E_C-3.png
0 → 100644
{kind=link}
29.3 KB
images/Appendix/E_C-4.png
0 → 100644
{kind=link}
42.3 KB
images/Appendix/E_C-5.png
0 → 100644
{kind=link}
24.1 KB
images/Appendix/E_D-1.png
0 → 100644
{kind=link}

41.2 KB
images/Appendix/E_D-2.png
0 → 100644
{kind=link}
43.2 KB
images/Appendix/E_D-3.png
0 → 100644
{kind=link}
50.7 KB
images/Appendix/E_D-4.png
0 → 100644
{kind=link}
8.6 KB
{kind=link}
{kind=link}
| W: | H:

| W: | H:
{kind=link}
{kind=link}

| W: | H:

| W: | H:
{kind=link}
{kind=link}

| W: | H:

| W: | H: