1.0.0rc3: Face+Debug+MPI render improved+minor bugs fixed (see release_notes)
Showing
{kind=link}
doc/media/keypoints_face.png
0 → 100644
{kind=link}

34.3 KB
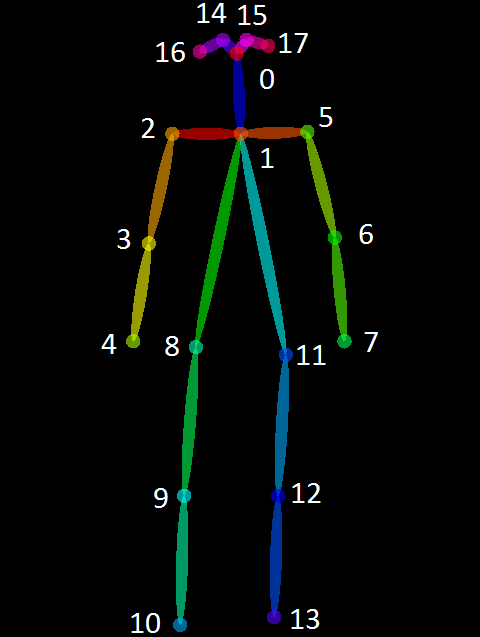
doc/media/keypoints_pose.png
0 → 100644
{kind=link}
10.9 KB
{kind=link}
{kind=link}

| W: | H:

| W: | H:
doc/release_notes.md
0 → 100644
include/openpose/core/point.hpp
0 → 100644
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
models/face/pose_deploy.prototxt
0 → 100644
此差异已折叠。
此差异已折叠。
src/openpose/core/point.cpp
0 → 100644
此差异已折叠。
src/openpose/core/rectangle.cpp
0 → 100644
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。