move documentation repo to rt-thread repo
Showing
documentation/README.md
0 → 100644
documentation/at/at.md
0 → 100644
此差异已折叠。
{kind=link}

7.2 KB
{kind=link}
35.5 KB
documentation/basic/basic.md
0 → 100644
此差异已折叠。
{kind=link}
18.4 KB
{kind=link}
51.9 KB
{kind=link}
58.5 KB
{kind=link}
14.7 KB
{kind=link}
15.7 KB
文件已移动
文件已移动
{kind=link}
9.1 KB
{kind=link}
13.1 KB
{kind=link}
19.9 KB
{kind=link}
18.2 KB
{kind=link}
56.6 KB
{kind=link}
80.5 KB
{kind=link}
8.3 KB
{kind=link}
137.9 KB
{kind=link}
80.9 KB
documentation/device/adc/adc.md
0 → 100644
{kind=link}
31.4 KB
documentation/device/device.md
0 → 100644
此差异已折叠。
{kind=link}
14.0 KB
{kind=link}
17.1 KB
{kind=link}
20.3 KB
{kind=link}
15.9 KB
{kind=link}
19.6 KB
{kind=link}
46.2 KB
{kind=link}
9.5 KB
{kind=link}

14.6 KB
{kind=link}

7.6 KB
documentation/device/i2c/i2c.md
0 → 100644
{kind=link}
16.0 KB
documentation/device/pin/pin.md
0 → 100644
{kind=link}
14.8 KB
{kind=link}
10.5 KB
documentation/device/pwm/pwm.md
0 → 100644
documentation/device/rtc/rtc.md
0 → 100644
{kind=link}
7.9 KB
{kind=link}
9.8 KB
{kind=link}
45.7 KB
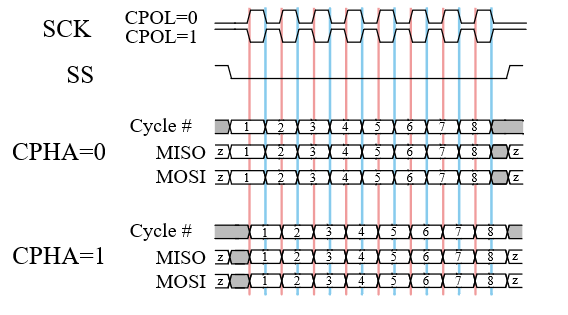
documentation/device/spi/spi.md
0 → 100644
此差异已折叠。
{kind=link}
39.3 KB
{kind=link}
40.0 KB
{kind=link}

3.3 KB
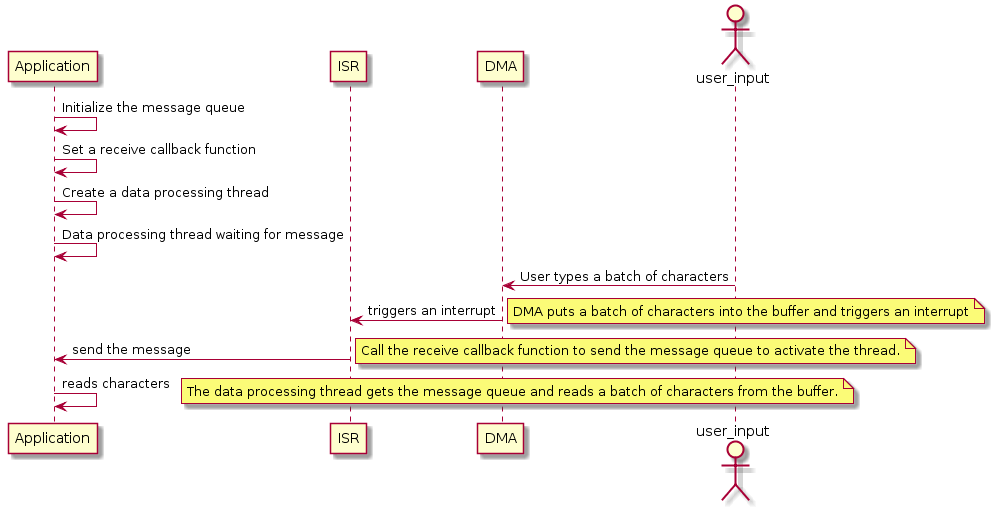
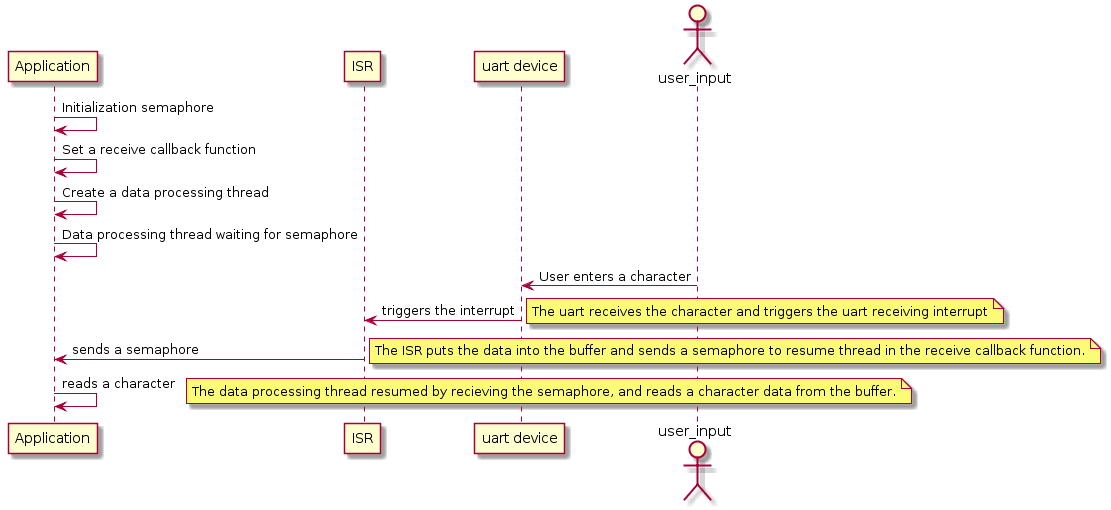
documentation/device/uart/uart.md
0 → 100644
此差异已折叠。
{kind=link}
54.4 KB
{kind=link}
27.0 KB
{kind=link}
32.6 KB
{kind=link}
53.3 KB
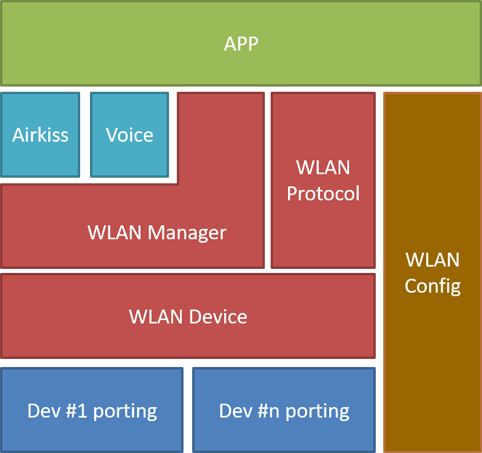
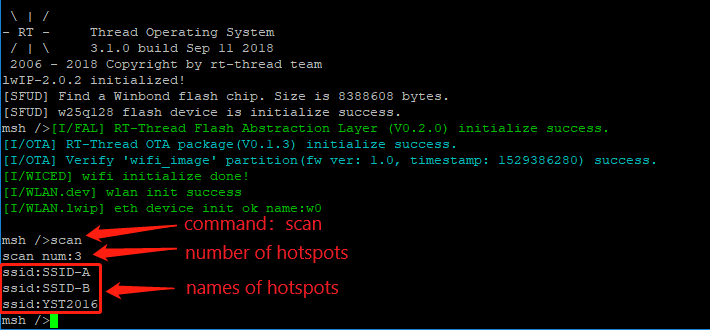
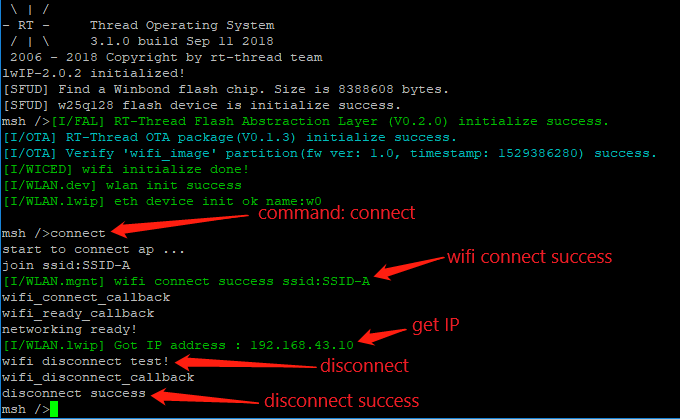
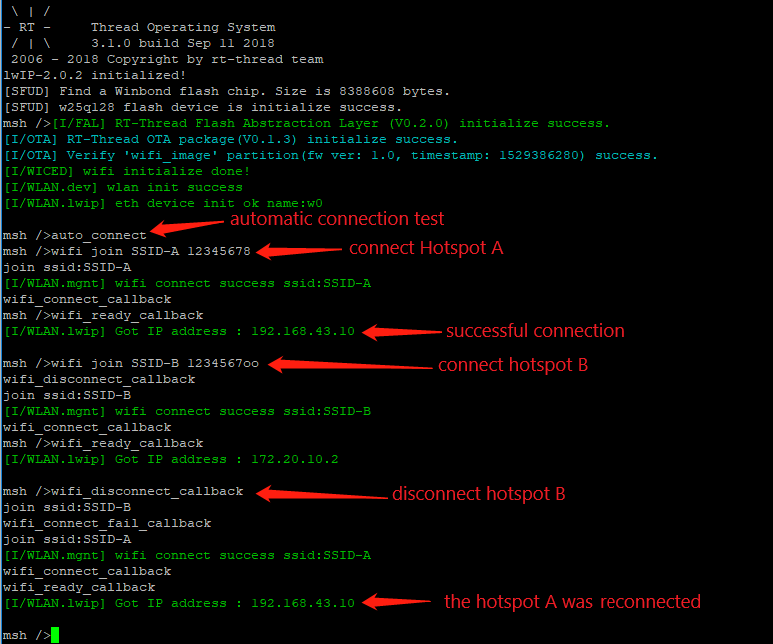
documentation/device/wlan/wlan.md
0 → 100644
此差异已折叠。
documentation/dlmodule/README.md
0 → 100644
此差异已折叠。
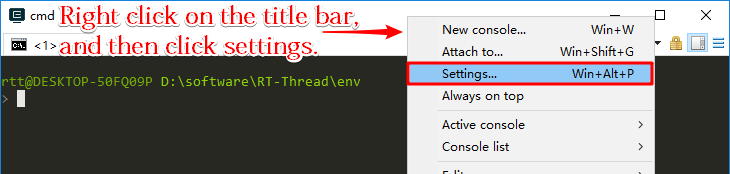
documentation/env/env.md
0 → 100644
此差异已折叠。
{kind=link}
24.4 KB
{kind=link}
52.5 KB
{kind=link}
76.3 KB
{kind=link}
24.9 KB
{kind=link}
18.2 KB
{kind=link}
83.2 KB
{kind=link}
27.4 KB
{kind=link}
21.9 KB
{kind=link}
20.8 KB
{kind=link}
31.2 KB
documentation/env/figures/q1.png
0 → 100644
{kind=link}
121.8 KB
{kind=link}
19.5 KB
{kind=link}
27.2 KB
{kind=link}
27.7 KB
此差异已折叠。
{kind=link}
22.5 KB
{kind=link}
10.8 KB
{kind=link}
21.8 KB
{kind=link}
18.2 KB
{kind=link}
9.6 KB
{kind=link}
20.7 KB
{kind=link}
13.0 KB
{kind=link}
89.6 KB
{kind=link}
44.5 KB
{kind=link}
17.2 KB
documentation/finsh/finsh.md
0 → 100644
此差异已折叠。
{kind=link}
15.7 KB
{kind=link}
22.1 KB
{kind=link}
23.9 KB
{kind=link}
30.4 KB
{kind=link}
5.1 KB
{kind=link}
38.3 KB
{kind=link}
9.2 KB
{kind=link}
19.1 KB
{kind=link}
19.6 KB
{kind=link}
12.8 KB
{kind=link}
6.2 KB
此差异已折叠。
{kind=link}
27.7 KB
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
documentation/memory/memory.md
0 → 100644
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
documentation/network/network.md
0 → 100644
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
documentation/pm/pm.md
0 → 100644
此差异已折叠。
documentation/posix/README.md
0 → 100644
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
此差异已折叠。
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
{kind=link}
此差异已折叠。
documentation/sal/sal.md
0 → 100644
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
documentation/scons/scons.md
0 → 100644
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
documentation/thread/thread.md
0 → 100644
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
documentation/timer/timer.md
0 → 100644
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
documentation/ulog/ulog.md
0 → 100644
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
documentation/utest/utest.md
0 → 100644
此差异已折叠。