Description: update docs 20210107
CommitID:90b0e9d610bad9ad7014d889110e055e29599d6d
Showing
bundles/HPM介绍.md
0 → 100644
bundles/操作实例.md
0 → 100644
bundles/环境准备.md
0 → 100644
bundles/组件开发示例.md
0 → 100644
docs-en/bundles/hpm-user-guide.md
0 → 100644
docs-en/bundles/introduction.md
0 → 100644
docs-en/bundles/preparations-1.md
0 → 100644
docs-en/porting/Readme-EN.md
0 → 100644
{kind=link}
25.8 KB
{kind=link}
5.0 KB
docs-en/porting/overview.md
0 → 100644
此差异已折叠。
{kind=link}
580 字节
{kind=link}
580 字节
{kind=link}
394 字节
{kind=link}
406 字节
{kind=link}
253 字节
{kind=link}
580 字节
此差异已折叠。
{kind=link}
37.9 KB
{kind=link}
4.8 KB
{kind=link}
19.9 KB
{kind=link}
24.4 KB
{kind=link}
17.3 KB
{kind=link}
23.8 KB
{kind=link}
44.6 KB
{kind=link}
24.6 KB
{kind=link}
17.3 KB
{kind=link}

252 字节
{kind=link}
16.2 KB
{kind=link}

252 字节
{kind=link}
5.1 KB
{kind=link}
18.0 KB
{kind=link}
{kind=link}

| W: | H:
| W: | H:
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
docs-en/subsystems/dfx-3.md
0 → 100644
此差异已折叠。
docs-en/subsystems/dfx.md
0 → 100644
docs-en/subsystems/faq-4.md
0 → 100644
docs-en/subsystems/faq.md
0 → 100644
{kind=link}
31.8 KB
{kind=link}
21.4 KB
{kind=link}
45.3 KB
{kind=link}
7.0 KB
{kind=link}
5.6 KB
{kind=link}
8.0 KB
{kind=link}
60.5 KB
{kind=link}

9.2 KB
{kind=link}

6.5 KB
{kind=link}
3.1 KB
{kind=link}
21.3 KB
{kind=link}
54.8 KB
{kind=link}
16.5 KB
{kind=link}

5.6 KB
{kind=link}
此差异已折叠。
docs-en/subsystems/graphics-0.md
0 → 100644
此差异已折叠。
docs-en/subsystems/multimedia.md
0 → 100644
此差异已折叠。
docs-en/subsystems/overview-1.md
0 → 100644
此差异已折叠。
docs-en/subsystems/overview-2.md
0 → 100644
此差异已折叠。
docs-en/subsystems/reference.md
0 → 100644
此差异已折叠。
此差异已折叠。
docs-en/subsystems/testing.md
0 → 100644
此差异已折叠。
此差异已折叠。
docs-en/subsystems/utils-faq.md
0 → 100644
此差异已折叠。
此差异已折叠。
docs-en/subsystems/utils.md
0 → 100644
此差异已折叠。
docs-en/subsystems/xts.md
0 → 100644
此差异已折叠。
此差异已折叠。
此差异已折叠。
{kind=link}
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
porting/CMake方式组织编译的库移植.md
0 → 100644
此差异已折叠。
porting/Makefile方式组织编译的库移植.md
0 → 100644
此差异已折叠。
porting/Readme-CN.md
0 → 100644
此差异已折叠。
{kind=link}
此差异已折叠。
porting/figures/添加位置示意图.png
0 → 100644
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
porting/概述.md
0 → 100644
此差异已折叠。
quick-start/Hi3516常见问题.md
0 → 100644
此差异已折叠。
quick-start/Hi3516搭建环境.md
0 → 100644
此差异已折叠。
quick-start/Hi3518常见问题.md
0 → 100644
此差异已折叠。
quick-start/Hi3518搭建环境.md
0 → 100644
此差异已折叠。
quick-start/Hi3861常见问题.md
0 → 100644
此差异已折叠。
quick-start/Hi3861搭建环境.md
0 → 100644
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
quick-start/开发Hi3861第一个示例程序.md
0 → 100644
此差异已折叠。
quick-start/开发Hi3861第二个示例程序.md
0 → 100644
此差异已折叠。
subsystems/DFX.md
0 → 100644
此差异已折叠。
subsystems/DFX子系统概述.md
0 → 100644
此差异已折叠。
subsystems/XTS认证.md
0 → 100644
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
subsystems/figures/unnaming.png
0 → 100644
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
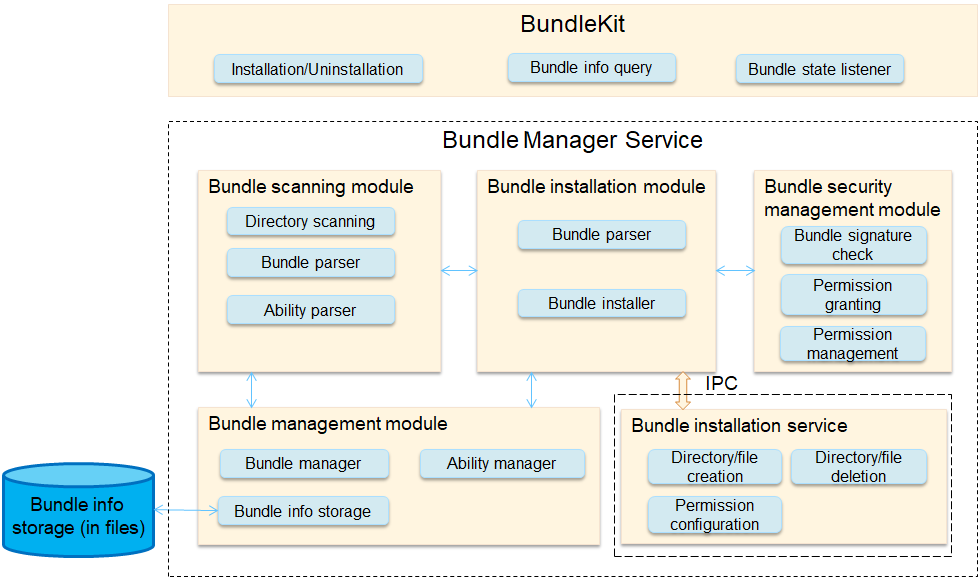
subsystems/figures/包管理子系统框架图.png
0 → 100644
{kind=link}
此差异已折叠。
subsystems/figures/启动阶段打印图示.png
0 → 100644
{kind=link}
此差异已折叠。
subsystems/figures/图片1.png
0 → 100644
{kind=link}
此差异已折叠。
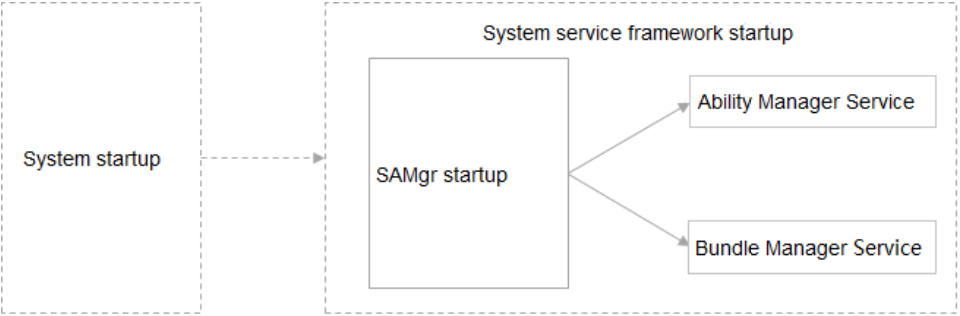
subsystems/figures/应用启动流程.png
0 → 100644
{kind=link}
此差异已折叠。
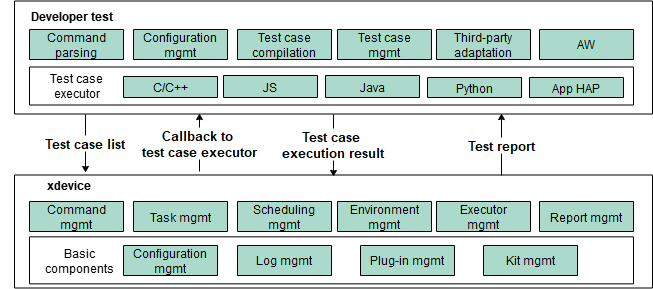
subsystems/figures/测试工具架构.png
0 → 100644
{kind=link}
此差异已折叠。
subsystems/figures/测试工具运行时序.png
0 → 100644
{kind=link}
此差异已折叠。
subsystems/使用featured框架开发.md
0 → 100644
此差异已折叠。
subsystems/使用mini框架开发.md
0 → 100644
此差异已折叠。
subsystems/公共基础.md
0 → 100644
此差异已折叠。
subsystems/公共基础库常见问题.md
0 → 100644
此差异已折叠。
subsystems/公共基础库开发指导.md
0 → 100644
此差异已折叠。
subsystems/公共基础库概述.md
0 → 100644
此差异已折叠。
此差异已折叠。
subsystems/参考.md
0 → 100644
此差异已折叠。
subsystems/媒体.md
0 → 100644
此差异已折叠。
subsystems/常见问题-0.md
0 → 100644
此差异已折叠。
subsystems/常见问题.md
0 → 100644
此差异已折叠。
subsystems/开发实例.md
0 → 100644
此差异已折叠。
subsystems/开发指导.md
0 → 100644
此差异已折叠。
subsystems/搭建环境.md
0 → 100644
此差异已折叠。
subsystems/概述.md
0 → 100644
此差异已折叠。
subsystems/测试.md
0 → 100644
此差异已折叠。
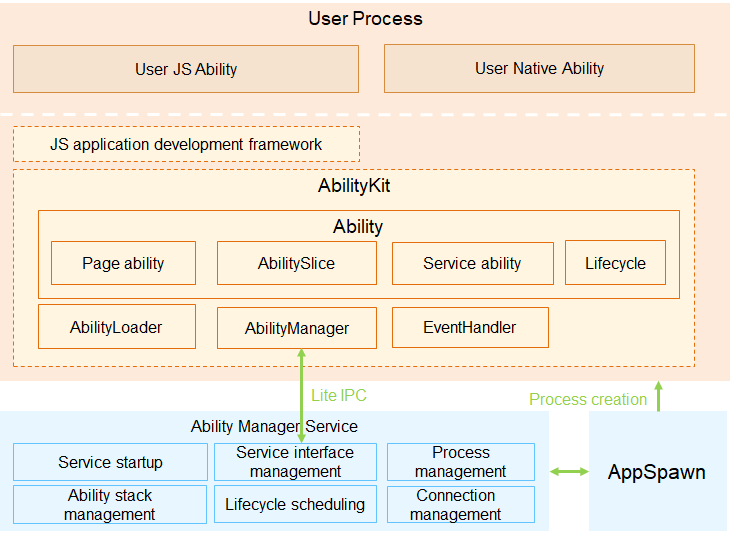
subsystems/用户程序框架.md
0 → 100644
此差异已折叠。
subsystems/编译构建.md
0 → 100644
此差异已折叠。
subsystems/编译构建使用指导.md
0 → 100644
此差异已折叠。
subsystems/编译构建常见问题.md
0 → 100644
此差异已折叠。
subsystems/编译构建概述.md
0 → 100644
此差异已折叠。