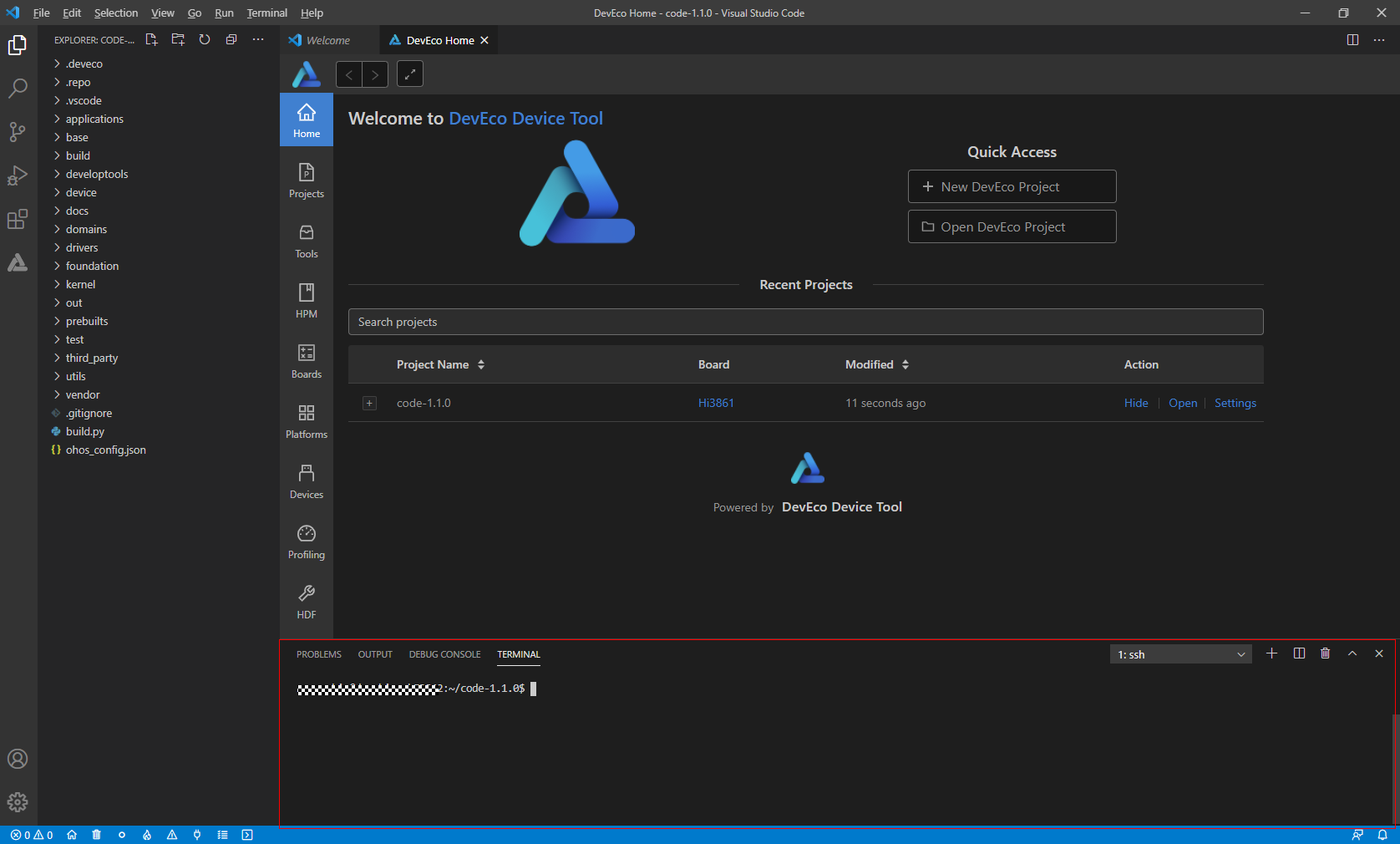
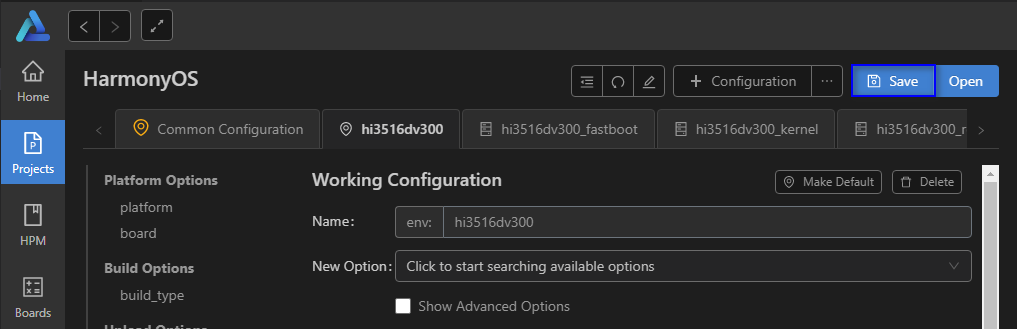
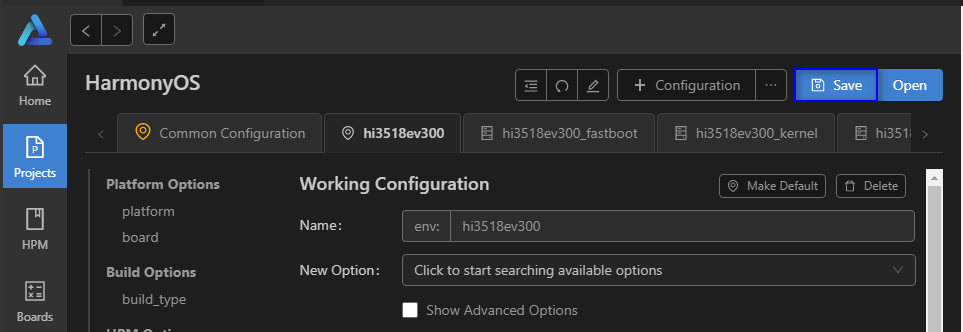
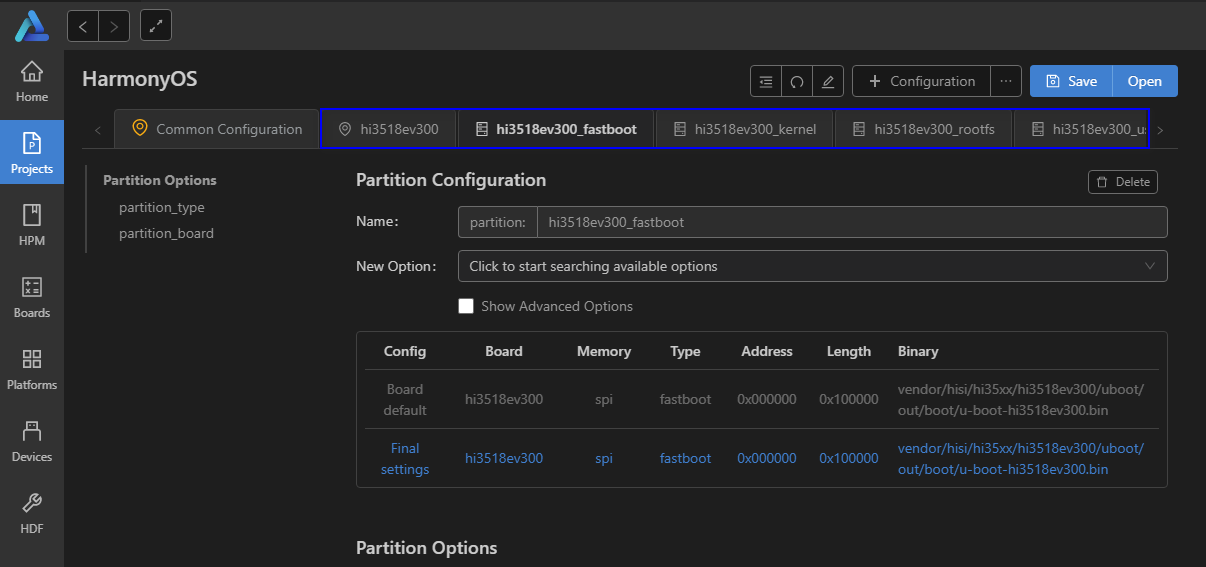
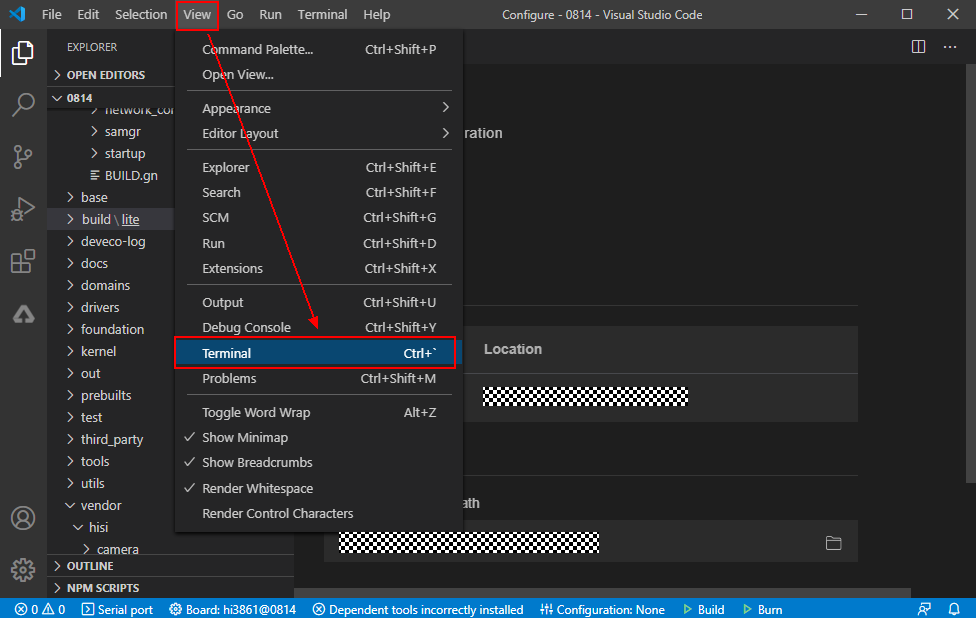
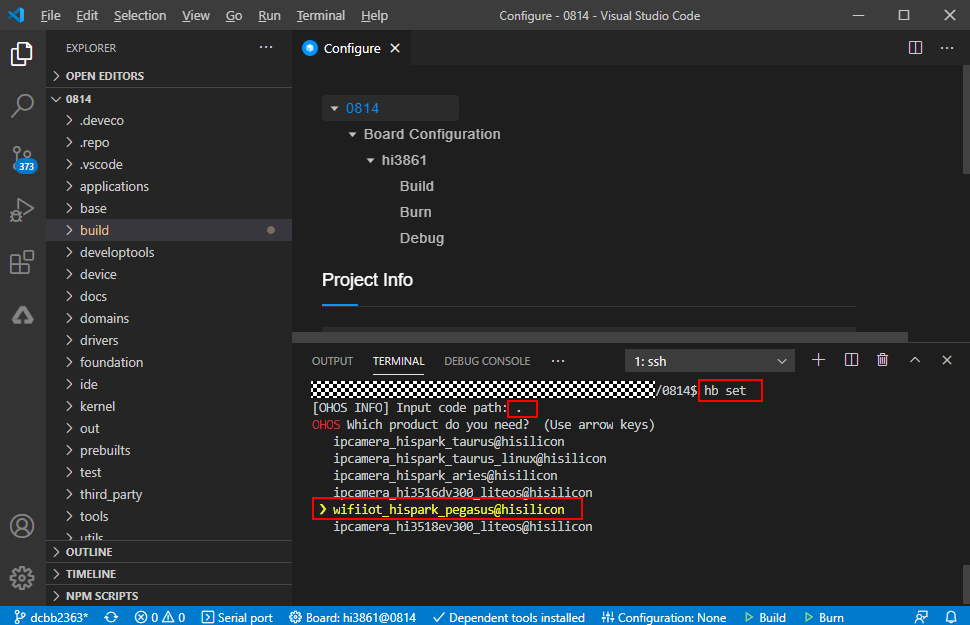
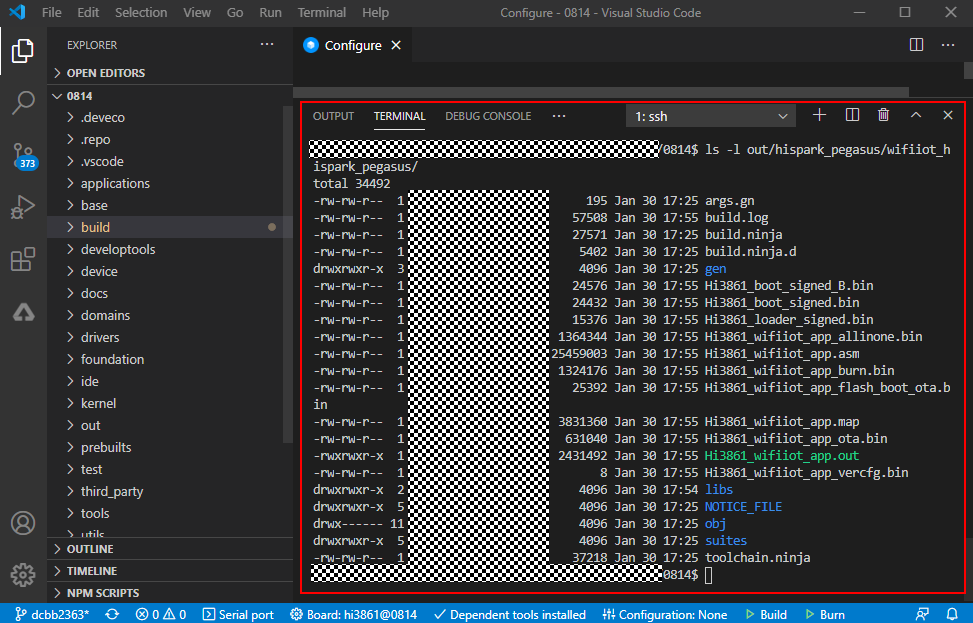
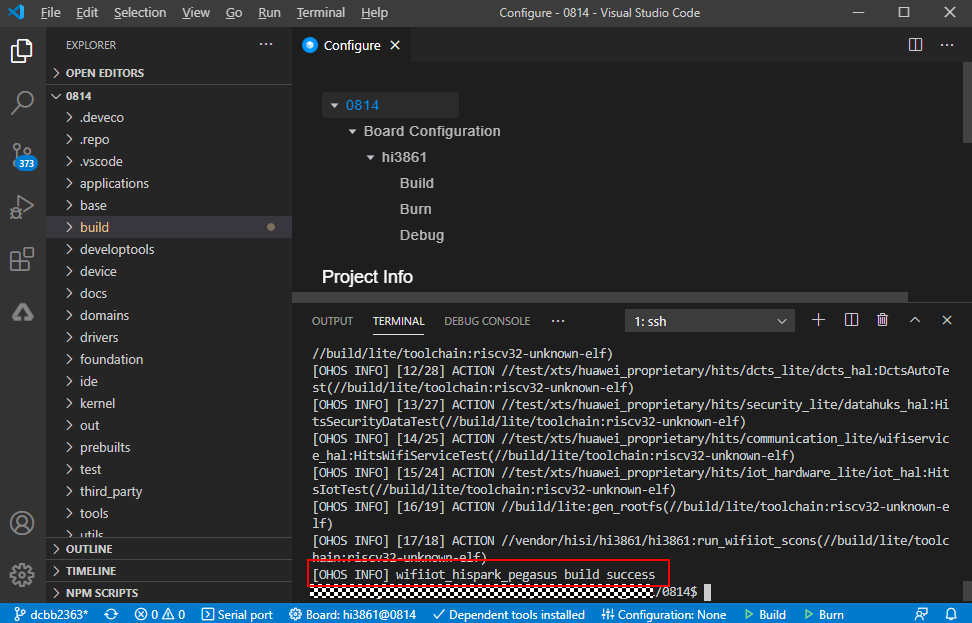
!299 update quick start images and steps
Merge pull request !299 from NEEN/master
Showing
{kind=link}
119.6 KB
{kind=link}
86.5 KB
{kind=link}
16.2 KB
{kind=link}
{kind=link}

| W: | H:
| W: | H:
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
{kind=link}

| W: | H:
| W: | H:
{kind=link}
文件已移动
{kind=link}

44.1 KB
{kind=link}
{kind=link}
| W: | H:
| W: | H:
{kind=link}
{kind=link}
| W: | H:
| W: | H:
{kind=link}
103.1 KB
{kind=link}

113.9 KB
{kind=link}

61.9 KB
{kind=link}
46.5 KB
{kind=link}
56.5 KB
{kind=link}
37.9 KB
{kind=link}
85.2 KB
{kind=link}
{kind=link}
| W: | H:
| W: | H:
{kind=link}

3.4 KB
{kind=link}

255 字节
{kind=link}
56.3 KB
{kind=link}
54.1 KB
{kind=link}
53.4 KB
{kind=link}
69.2 KB
{kind=link}
51.4 KB
{kind=link}
69.4 KB
{kind=link}
100.5 KB
{kind=link}
86.3 KB
{kind=link}
60.2 KB
{kind=link}
{kind=link}
| W: | H:

| W: | H:
{kind=link}
60.1 KB
{kind=link}
5.4 KB
{kind=link}
65.1 KB
{kind=link}
文件已移动
{kind=link}
52.8 KB
{kind=link}

57.6 KB
{kind=link}
文件已移动
{kind=link}
22.5 KB
{kind=link}
119.6 KB
{kind=link}
86.5 KB
{kind=link}
24.0 KB
{kind=link}
文件已移动
{kind=link}

386 字节
{kind=link}
23.7 KB
{kind=link}
文件已移动
{kind=link}

386 字节
{kind=link}
37.9 KB
{kind=link}
文件已移动
{kind=link}

44.1 KB
{kind=link}
{kind=link}
| W: | H:
| W: | H:
{kind=link}
{kind=link}
| W: | H:
| W: | H:
{kind=link}
103.1 KB
{kind=link}
113.9 KB
{kind=link}
61.9 KB
{kind=link}

57.6 KB
{kind=link}
37.9 KB
{kind=link}
85.2 KB
{kind=link}
{kind=link}
| W: | H:
| W: | H:
{kind=link}
56.3 KB
{kind=link}
69.2 KB
{kind=link}
69.4 KB
{kind=link}
100.5 KB
{kind=link}
86.3 KB
{kind=link}

60.2 KB
{kind=link}

65.1 KB
{kind=link}
22.5 KB
{kind=link}
60.1 KB
{kind=link}
{kind=link}
| W: | H:

| W: | H:
{kind=link}
13.4 KB
{kind=link}
文件已移动