Doc improved, Mac bug fixed
Showing
doc/media/dance_foot.gif
0 → 100644
{kind=link}

4.2 MB
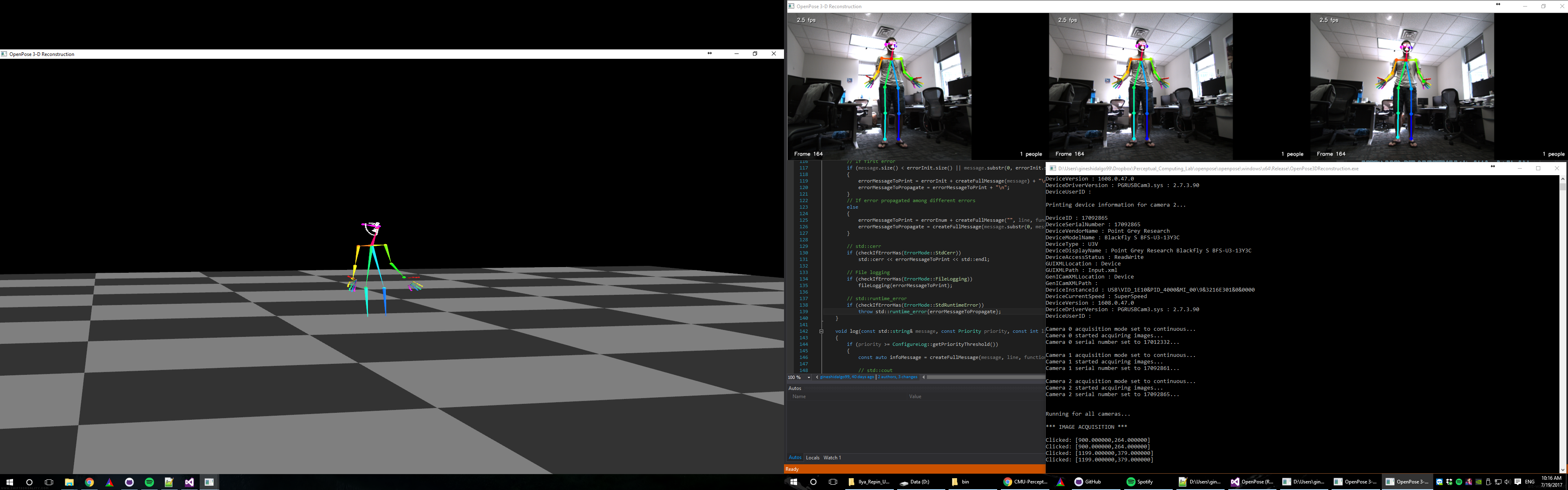
doc/media/openpose3d.gif
0 → 100644
{kind=link}
179.7 KB
doc/media/openpose3d.png
已删除
100644 → 0
{kind=link}
1.2 MB
examples/user_code/CMakeLists.txt
0 → 100644
examples/user_code/README.md
0 → 100644